
ESP-Claw Open Source: Bringing Agent Runtime to ESP32
ESP-Claw is an open-source framework from Espressif that brings agent-style sensing, reasoning, and action loops to ESP32 devices, with local memory, deterministic Lua rules, and MCP interoperability.
ESP-Claw addresses a long-standing IoT problem: most connected devices can execute commands, but they cannot make context-aware decisions on their own.
This article explains what ESP-Claw introduces on ESP32, how its runtime combines deterministic and LLM-based decision paths, and why MCP support matters for practical edge automation.
Why Traditional IoT Feels Limited
Most IoT products still rely on static rules and cloud-driven control.
Common pain points include:
- Connected, but not adaptive
- Reactive, but not truly autonomous
- Cloud-dependent in critical paths
- Fragmented UX across many apps and control panels
In short, conventional devices execute predefined logic, but rarely infer intent from dynamic real-world context.
What ESP-Claw Is
ESP-Claw is an AI agent framework designed for ESP32-class chips. Its core idea is conversational configuration: users can define device behavior through chat instead of writing firmware logic for every workflow.
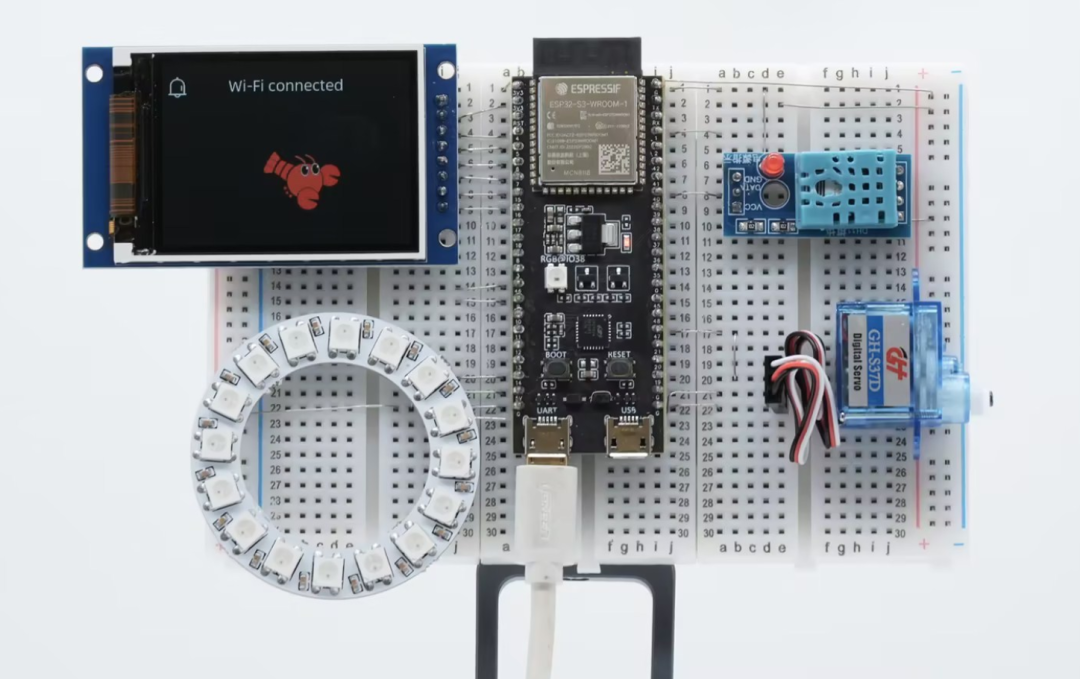
The target loop runs across edge components:
- Sense: collect sensor or state data
- Reason: evaluate local and external context
- Decide: choose a deterministic or model-driven action path
- Act: trigger device capabilities or external services
Core Capabilities
Chat-Driven Behavior Definition
Conclusion: ESP-Claw reduces automation setup friction by turning natural language instructions into executable behavior.
Traditional flow often looks like this:
Select chip -> SDK setup -> Write C code -> Build -> Flash -> Network config -> App control
ESP-Claw-oriented flow can be much shorter:
Flash firmware -> Connect Wi-Fi -> Chat in IM client -> Device executes policy
Example instruction:
Every day at 08:00, if temperature is above 28 C, turn on the fan and notify me.
Edge-Native Closed Loop
Conclusion: devices can complete many decisions locally, while escalating only complex tasks to cloud models.
On-device runtime can handle:
- Sensor perception (temperature, light, PIR, and more)
- State reasoning for local conditions
- Decision routing via Lua rules or LLM paths
- Actuator control (fans, relays, displays, cameras)
This hybrid strategy supports both latency-sensitive control and higher-level reasoning.
Deterministic Lua + LLM Routing
Conclusion: ESP-Claw balances reliability and flexibility through a layered decision model.
| Layer | Mechanism | Typical latency | Best for |
|---|---|---|---|
| 1 | Lua deterministic rules | Milliseconds | Safety and hard constraints |
| 2 | LLM local/near-edge decision | Seconds | Intent understanding and scene logic |
| 3 | Cloud foundation models | Longer path | Complex reasoning and multimodal tasks |
Routing pattern:
- Matching rule exists: execute Lua immediately
- Rule missing: escalate to LLM reasoning path
- Capability exceeds edge budget: forward to cloud model
Local Memory and Privacy
Conclusion: memory can stay on the device while remaining queryable and efficient under MCU constraints.
Memory examples include:
- User preferences
- Repeated behavior patterns
- Alert and anomaly history
- Auto-suggested automations from historical signals
A lightweight tag-summary design can reduce retrieval cost by loading only compact indexes first, then resolving detailed entries on demand.
MCP Interoperability
Conclusion: MCP support turns devices into first-class AI participants instead of passive endpoints.
ESP-Claw can be viewed from two roles:
- As MCP server: expose sensors and actuators as callable tools
- As MCP client: call external MCP services for maps, messaging, or workflow actions
This creates a uniform tool interface across local hardware and remote services.
Assumption: availability of specific IM channels or third-party services depends on regional integration and account setup.
ESP-Claw vs Traditional IoT
| Dimension | Traditional IoT | ESP-Claw style edge AI |
|---|---|---|
| Primary model | Remote control and automation | Perception + reasoning + action |
| Logic style | Static IF/THEN | Deterministic rules + model routing |
| Control center | Cloud backend | Edge node first |
| Interoperability | Protocol-specific integration | MCP-based tool abstraction |
| Memory location | Mostly cloud | Local structured memory |
| User interface | App/dashboard centric | Chat-centric interaction |
Practical Scenarios
Smart Security
- PIR event triggers camera capture
- Detection pipeline classifies intruder vs non-intruder
- User receives alert summary and evidence in IM
Smart Thermal Control
- Device stores preferred comfort range
- Fan/AC control triggers on threshold and schedule
- System proposes pre-cooling when repeated manual behavior is detected
Hardware Development Assistant
- Board camera captures PCB snapshots for inspection workflows
- Build status can be pushed to local displays or IM channels
- Error notifications can include suggested remediation hints
Office Automation
- Occupancy and ambient signals drive HVAC behavior
- Meeting reminders and commute-aware notices can be dispatched via external services
Quick Start
Supported Targets
At launch, public examples mention:
- ESP32-S3
- ESP32-C5
- ESP32-P4
Method 1: Web Flasher
- Open Espressif web flash tool.
- Select your chip target.
- Flash the firmware image.
- Complete Wi-Fi and runtime setup.
Method 2: Build from Source
git clone https://github.com/espressif/esp-claw.git
cd esp-claw
# Build and flash with ESP-IDF environment prepared
idf.py build
idf.py flash
Runtime Configuration
- Connect device to Wi-Fi
- Open local web configuration page
- Bind IM channel and issue behavior instructions
- Choose model providers according to your deployment needs
Project Structure Overview
esp-claw/
application/
basic_demo/
main/
main.c
app_claw.c
basic_demo_wifi.c
config_http_server.c
web/
components/
claw_modules/
claw_core/
claw_cap/
claw_event/
claw_memory/
claw_skill/
claw_capabilities/
lua_modules/
A practical way to read this stack:
- Application assembly layer: boot flow, networking, web setup
- Capability layer: IM, MCP, Lua runtime, schedulers
- Runtime core layer: context, registration, routing, memory
- Hardware extension layer: display, camera, audio, GPIO, peripherals
Final Thoughts
ESP-Claw suggests a meaningful shift for embedded systems: from command execution endpoints to autonomous edge participants that can reason, remember, and collaborate through standardized interfaces.
If this model matures in tooling and ecosystem support, it can lower the barrier to intelligent IoT development while preserving local responsiveness and privacy-sensitive deployment options.
References
- Espressif ESP-Claw repository: https://github.com/espressif/esp-claw
Share this article
Comments
0Please sign in to post a comment.
No comments yet.